Terrestrial Gravimetry
-
Establishing an Advanced Mexican Gravity Standardization BaseThis joint research project serves for following main scientific objectives: a) supporting the realization of a state of the art national gravity standard in Mexico fulfilling highest accuracy demands in metrology, b) supporting the establishment of a base for a national reference frame for geo-scientific purposes, c) supporting the improvement of a global gravity potential field model for fundamental research in earth scienceLed by: Dr.-Ing. Ludger TimmenTeam:Year: 2016Funding: Physikalisch-Technische Bundesanstalt Braunschweig
![]()
![]()
-
Traceability of the FG5X-220 to the SI unitsThe Micro-g LaCoste FG5 is a free-fall gravimeter with a laser interferometer in Mach-Zehnder configuration which uses simultaneous time and distance measurements to calculate the absolute value of g. The instrument itself contains the necessary standards, a rubidium oscillator and a He-Ne Laser, and operates independent of external references. These internal standards need regular comparisons.Led by: Dr.-Ing. Ludger TimmenTeam:Year: 2012
![]()
![]() © IfE / M. Schilling
© IfE / M. Schilling
-
Improved compensation of vibrational noise in the laser interferometer with applications in absolute gravimetryLed by: Dr. Sergiy SvitlovYear: 2011Funding: DFGDuration: 2011 - 2018
-
Absolute gravimetry in DenmarkLed by: Dr.-Ing. Ludger TimmenTeam:Year: 2003
![]()
![]()





Gravity Field and Geoid Modelling
-
Regional gravity field modeling & relativistic geodesy (CRC 1128, C04)Led by: Dr.-Ing. Heiner DenkerTeam:Year: 2014Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 01.07.2014 – 30.06.2018
-
The recovery of Earth’s global gravity field from GOCE observationsThe ESA’s GOCE (Gravity field and steady-state Ocean Circulation Explorer) mission was the first to jointly apply SGG (satellite gravity gradiometry) and SST-hl (satellite-to-satellite high-low tracking) techniques to map the Earth’s gravity field. It delivered hundreds of millions of observations in four years’ lifetime, from 2009 to 2013. My Ph.D work is to recover a global gravity field model that is described by 62,997 spherical harmonic coefficients (up to degree/order 250) from the huge amount of GOCE observations.Led by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2011Funding: StipendiumDuration: 2011-2016
![]()
![]()
-
GOCE-GRavitationsfeldANalyse Deutschland – GOCE-GRAND II WP220 – Regionales Validierungs- und KombinationsexperimentWithin the framework of the project, high-quality validated terrestrial gravity field data sets (in particular deflections of the vertical and gravity data) were generated in Germany and Europe for the external validation of GOCE products. These data were used for the validation of existing satellite gravity models on the one hand and for the calculation of corresponding combined quasigeoid solutions for Germany and Europe on the other hand.Led by: Dr.-Ing. Heiner Denker (WP220 - IfE)Team:Year: 2005Funding: Research and development programme GEOTECHNOLOGIEN, funded by the Federal Ministry of Education and Research (BMBF) and the German Research Foundation (DFG), Förderkennz. 03F0421DDuration: 01.09.2005 – 31.08.2008


Relativistic Geodesy
-
Transportable optical clock for relativistic geodesy (CRC 1128/2, A03)Led by: Priv.-Doz. Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. Heiner DenkerTeam:Year: 2018Funding: German Research Foundation (DFG)Duration: 01.07.2018 – 30.06.2019
-
Relativistic effects in satellite constellations (CRC 1128, C02)Led by: Dr.-Ing. habil. Enrico Mai, Dr. Eva Hackmann (ZARM), Prof. Dr. Claus Lämmerzahl (ZARM)Team:Year: 2014Funding: DFG
-
Clock network modeling (CRC 1128, C03)Led by: Prof. Dr. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Year: 2014Funding: DFG
Satellite Gravimetry
-
Data analysis challenge for the GRACE-FO community (CRC 1128, B04)Led by: Dr.-Ing. Majid Naeimi, Dr. Martin Hewitson, Dr. Meike ListTeam:Year: 2015Funding: DFG
-
Fusion of ranging, accelerometry, and attitude sensing in the multi-sensor system for laserinterferometric inter-satellite ranging (CRC 1128, B02)The quality of gravity field results obtained from GRACE and GRACE Follow-On inter-satellite ranging does not only depend on the ranging measurement accuracy. Equally important is the quality of the integration in the multi-sensor system consisting of inter-satellite ranging, GNSS orbit tracking, accelerometry, and attitude sensing, and the performance of this system as a whole. The system performance is influenced, e.g., by star camera attitude performance, by the characteristics of satellite pointing jitter coupling, by inaccurate knowledge and instabilities of phase centers and alignments, and by accelerometer signal disturbances.Led by: Prof. Jakob Flury, Dr. Gerhard HeinzelTeam:Year: 2014Funding: DFGDuration: 2014-2018
![]()
![]()
-
High performance satellite formation flight simulator (CRC 1128, B05)Led by: Dr. Meike List (ZARM), Dr.-Ing. Benny Rievers (ZARM)Team:Year: 2014Funding: DFG
-
System studies for an optical gradiometer mission (CRC 1128, B07)Led by: Dr. Gerhard Heinzel, Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG
-
GOCE-GRavitationsfeldANalyse Deutschland – GOCE-GRAND AP6 – Bestimmung äußerer Eichfaktoren und Validierung der ErgebnisseThe project investigated methods for calibration and validation of GOCE results with external gravity field data.Led by: Prof. Dr.-Ing. Reiner RummelTeam:Year: 2002Funding: Research and development programme GEOTECHNOLOGIEN, funded by the Federal Ministry of Education and Research (BMBF) and the German Research Foundation (DFG)Duration: 01.01.2002 – 31.12.2004


GNSS and Inertial Navigation
-
5GAPS: 5G Access to Public SpacesIn this research project, the positioning capabilities of the latest mobile communication standard 5G NR are investigated. Due to the increasing demand for communication and the widespread installation of 5G NR networks, terrestrial signal sources can provide an alternative or complement to GNSS signals when GNSS signals are unavailable or a limited by the environment.Led by: Prof. Dr.-Ing Steffen SchönTeam:Year: 2022Funding: Federal Ministry of Transport and Digital Infrastructure (BMDV), grant number: 45FG121_F
-
Correction of GNSS multipath effects for reliable autonomous localisation of highly automated vehicles in metropolitan areas (KOMET)The code range (code measurement) used in automotive applications often cannot provide the required resolution of the location due to the high measurement noise. The complex GNSS signal propagation (signal shading, multipath effects) in urban environments makes the determination of an accurate and robust positioning solution a particularly challenging task - e.g. for positioning in narrow street canyons. The research project aims to develop and implement innovative correction methods to reduce multipath effects in order to improve carrier phase-based GNSS positioning.Led by: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Year: 2020Funding: BMWi / TÜV Rheinland Consulting GmbH
![]()
![]() © Ch. Skupin (Bosch)
© Ch. Skupin (Bosch)
-
QGyro: Quantum Optics Inertial Sensor ResearchThe objective of this research programme is to develop and test high-precision quantum inertial sensors that support conventional inertial navigation sensors in order to expand these sensors to up to 6 degrees of freedom and use them for autonomous navigation in various further development stages.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2019Funding: Federal Minitry of Economics and Climate Affairs (BMWK / DLR), grant number: 50RK1957Duration: 2019 - 2022
![]()
![]()
-
Integrity Monitoring for Network RTK SystemsFrom the advent of the satellite positioning techniques, civil users have always been trying to find a way to have more accurate and precise coordinates of their position. Differential concepts, from early days of GPS, have been considered. Applying the RTCM format, made the transmission of corrections possible from reference stations to the users. At first stage the corrections were casted to the users from one single station, which is called single RTK (Real Time Kinematic). This method is limited in some ways; degrading by increasing distance from CORS (Continuously Operating Reference Station), needed same signals at reference and rover and remaining the reference station errors. For compensating these shortages, the Network RTK concept appeared. In NRTK the corrections are produced using a network (at least three) of reference stations. The concept of Precise Point Positioning (PPP) is currently associated with global networks. Precise orbit and clock solutions are used to enable absolute positioning of a single receiver. However, it is restricted in ambiguity resolution, in convergence time and in accuracy. Precise point positioning based on RTK networks (PPP-RTK) overcomes these limitations and gives centimeter-accuracy in a few seconds.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2018Funding: German Academic Exchange Service (DAAD)
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Strengthening the accuracy of kinematic orbits of Low Earth Orbiters through an adopted Precise Point Positioning (PPP) enhanced by GNSS Receiver Clock Modeling and the concept of a Virtual Receiver is the overall objective of this project.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2014Funding: DFG
![]()
![]()
-
Turbulence investigations and improved modelling of atmospheric refraction with VLBI and GNSSImproved characterization of refractivity fluctuations, determination of turbulence parameters and enhanced modelling of neutrospheric refraction effectsLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2012Funding: DFG (SCHO 1314/3-1)
-
Verbesserte Positionierung und Navigation durch konsistente Multi-GNSS AntennenkorrekturenInvestigation of effects of code phase delays (GDV) on the GNSS-based positioning and navigation as well as the development of a method for an adequate comparison of different calibration results.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2012Funding: BMWI | 50NA1216
![]()
![]()
-
Bürgernahes FlugzeugImprovement of quality and decrease of signal loss during GNSS-based curved landing approaches as part of the development of a "Metropolitain Aircraft".Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: Government of Lower Saxony
![]()
![]()
-
Navigation und Positionierung in difficult enviornmentsAnalyse of High-Sensitivity GNSS SensorsLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011
![]()
![]()
-
Modelling physical correlation of GNSS phase observations by means of turbulence theoryModelling of physikal Correlations on GNSS Phase Observables using the Approach of turbulence theoryLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: DFG (SCHO 1314/1-1).
![]()
![]()
-
Modeling and correction of GNSS multipath effect through Software receiver and Ray tracingDescribing Multipath by Software receiver and Ray tracing.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: BMWI and German Aerospace Center (DLR)
-
Investigations of distance dependent systematic effectsCorrection models for distance dependent effects in small GPS networksLed by: Dr.-Ing. Steffen SchönTeam:Year: 2006
-
Assessment of remaining systematic effects by interval mathematicsAssessment of remaining systematic effects by interval mathematicsLed by: Prof. Dr.-Ing. Steffen SchönYear: 2006Funding: Deutsche Forschungsgemeinschaft (DFG)










Lunar Laser Ranging (LLR)
-
Lunar Reference SystemsLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG - FOR 1503Duration: 2014-2019
![]()
![]()
-
Barycentric EphemerisBarycentric EphemerisLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2012Funding: DFG FOR1503 Reference Systems
![]()
![]()
-
Lunar Laser Ranging: Konsistente Modellierung für geodätische und wissenschaftliche AnwendungenLed by: Prof. Dr.-Ing. Jürgen MüllerTeam:Year: 2006Funding: DFG
![]()
![]()


Space Sensor Technologies
-
Swarm ESL/DISC: Support to accelerometer data analysis and processingLed by: Prof. Dr.-Ing. Jakob FluryTeam:Year: 2016Funding: ESA (DTU Space)Duration: 2016-2020
-
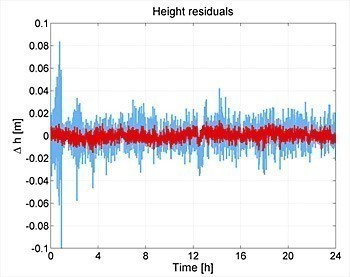
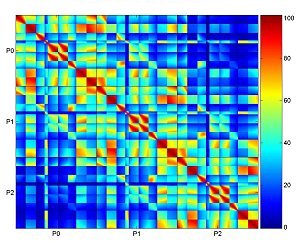
Disentangling gravitational signals and errors in global gravity field parameter estimation from satellite observations (SFB 1128, C01)Range-rate residuals from the estimation of global gravity field parameters from GRACE satellite-to-satellite tracking reveal a range of systematic effects that limit the accuracy of the estimated parameters. The project investigated the characteristics of time series of range-rate residuals. It addressed how drops in the K-band ranging signal-to-noise ratio at specific inter-satellite Doppler frequencies propagate to anomalies in range-rate residuals, as well as anomalies during penumbra transitions. A part of the project at TU Graz, in the group of Prof. Mayer-Gürr, studied options to use wavelet parameters in the SST gravity field parameter estimation.Led by: Prof. Jakob FluryTeam:Year: 2014Funding: DFGDuration: 2014-2018
-
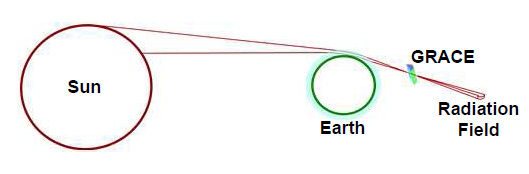
Highly physical penumbra solar radiation pressure modeling with atmospheric effectsDuring penumbra transitions of an Earth orbiter, the solar radiation hitting the satellite is strongly influenced by refraction and absorption of light rays grazing the Earth’s atmosphere. The project implemented solar radiation pressure modeling including these effects. Model results were tested by comparing with measurements of the accelerometers of the GRACE low Earth orbiters.Led by: Prof. Jakob Flury, Tamara BandikovaTeam:Year: 2010Funding: RISE/QUESTDuration: 2010
![]()
![]()
-
In-Orbit System Analysis of the Gravity Recovery and Climate Experiment (GRACE) MissionPrecise determination and control of satellite attitude plays a key role for satellite geodesy in general, and for Satellite-to-Satellite Tracking in particular. The project provided the first in-depth characterization of GRACE pointing biases and pointing variations. Investigations addressed star camera inter-boresight angle variations, the weighted camera sensor head combination, as well as error propagation to inter-satellite ranging and accelerometer observations. Results led to significant improvements in the operational GRACE data processing.Led by: Prof. Jakob FluryTeam:Year: 2009Funding: Exzellenzcluster QUESTDuration: 2009-2015
![]()
![]() © IfE / Bandikova
© IfE / Bandikova



CRC 1128 (geo-Q)
-
Transportable optical clock for relativistic geodesy (CRC 1128/2, A03)Led by: Priv.-Doz. Dr. Christian Lisdat, Prof. Dr. Piet O. Schmidt, Dr.-Ing. Heiner DenkerTeam:Year: 2018Funding: German Research Foundation (DFG)Duration: 01.07.2018 – 30.06.2019
-
Data analysis challenge for the GRACE-FO community (CRC 1128, B04)Led by: Dr.-Ing. Majid Naeimi, Dr. Martin Hewitson, Dr. Meike ListTeam:Year: 2015Funding: DFG
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Strengthening the accuracy of kinematic orbits of Low Earth Orbiters through an adopted Precise Point Positioning (PPP) enhanced by GNSS Receiver Clock Modeling and the concept of a Virtual Receiver is the overall objective of this project.Led by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2014Funding: DFG
![]()
![]()
-
Relativistic effects in satellite constellations (CRC 1128, C02)Led by: Dr.-Ing. habil. Enrico Mai, Dr. Eva Hackmann (ZARM), Prof. Dr. Claus Lämmerzahl (ZARM)Team:Year: 2014Funding: DFG
-
Disentangling gravitational signals and errors in global gravity field parameter estimation from satellite observations (SFB 1128, C01)Range-rate residuals from the estimation of global gravity field parameters from GRACE satellite-to-satellite tracking reveal a range of systematic effects that limit the accuracy of the estimated parameters. The project investigated the characteristics of time series of range-rate residuals. It addressed how drops in the K-band ranging signal-to-noise ratio at specific inter-satellite Doppler frequencies propagate to anomalies in range-rate residuals, as well as anomalies during penumbra transitions. A part of the project at TU Graz, in the group of Prof. Mayer-Gürr, studied options to use wavelet parameters in the SST gravity field parameter estimation.Led by: Prof. Jakob FluryTeam:Year: 2014Funding: DFGDuration: 2014-2018
-
Clock network modeling (CRC 1128, C03)Led by: Prof. Dr. Jürgen Müller, Prof. Dr. Claus LämmerzahlTeam:Year: 2014Funding: DFG
-
Fusion of ranging, accelerometry, and attitude sensing in the multi-sensor system for laserinterferometric inter-satellite ranging (CRC 1128, B02)The quality of gravity field results obtained from GRACE and GRACE Follow-On inter-satellite ranging does not only depend on the ranging measurement accuracy. Equally important is the quality of the integration in the multi-sensor system consisting of inter-satellite ranging, GNSS orbit tracking, accelerometry, and attitude sensing, and the performance of this system as a whole. The system performance is influenced, e.g., by star camera attitude performance, by the characteristics of satellite pointing jitter coupling, by inaccurate knowledge and instabilities of phase centers and alignments, and by accelerometer signal disturbances.Led by: Prof. Jakob Flury, Dr. Gerhard HeinzelTeam:Year: 2014Funding: DFGDuration: 2014-2018
![]()
![]()
-
High performance satellite formation flight simulator (CRC 1128, B05)Led by: Dr. Meike List (ZARM), Dr.-Ing. Benny Rievers (ZARM)Team:Year: 2014Funding: DFG
-
Regional gravity field modeling & relativistic geodesy (CRC 1128, C04)Led by: Dr.-Ing. Heiner DenkerTeam:Year: 2014Funding: Deutsche Forschungsgemeinschaft (DFG)Duration: 01.07.2014 – 30.06.2018
-
Modeling of mass variations down to small scales (CRC 1128, C05)Led by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG
![]()
![]()
-
System studies for an optical gradiometer mission (CRC 1128, B07)Led by: Dr. Gerhard Heinzel, Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2014Funding: DFG
-
Transportable quantum gravimeter (CRC 1128, A01)Led by: Prof. Dr. Jürgen Müller, Prof. Dr. Ernst M. RaselTeam:Year: 2014Funding: DFG


QUEST
-
Satellite Navigation using high precise OscillatorsExamination of high precise Oscillators in the application area of Satellite NavigationLed by: Prof. Dr.-Ing. Steffen SchönTeam:Year: 2011Funding: QUEST
![]()
![]()
-
Potential Field Determination and high precise OscillatorsDetermination of the Earth's Gravity Field using high precise OscillatorsLed by: Prof. Dr.-Ing. habil. Jürgen MüllerTeam:Year: 2011Funding: QUEST (Quantum Engineering and Space Time Research)
![]()
![]()
-
Highly physical penumbra solar radiation pressure modeling with atmospheric effectsDuring penumbra transitions of an Earth orbiter, the solar radiation hitting the satellite is strongly influenced by refraction and absorption of light rays grazing the Earth’s atmosphere. The project implemented solar radiation pressure modeling including these effects. Model results were tested by comparing with measurements of the accelerometers of the GRACE low Earth orbiters.Led by: Prof. Jakob Flury, Tamara BandikovaTeam:Year: 2010Funding: RISE/QUESTDuration: 2010
![]()
![]()
-
In-Orbit System Analysis of the Gravity Recovery and Climate Experiment (GRACE) MissionPrecise determination and control of satellite attitude plays a key role for satellite geodesy in general, and for Satellite-to-Satellite Tracking in particular. The project provided the first in-depth characterization of GRACE pointing biases and pointing variations. Investigations addressed star camera inter-boresight angle variations, the weighted camera sensor head combination, as well as error propagation to inter-satellite ranging and accelerometer observations. Results led to significant improvements in the operational GRACE data processing.Led by: Prof. Jakob FluryTeam:Year: 2009Funding: Exzellenzcluster QUESTDuration: 2009-2015
![]()
![]() © IfE / Bandikova
© IfE / Bandikova