Forschungsprojekte aus dem Bereich Positionierung und Navigation
Antennenkalibrierung
-
Accurate prediction of GNSS antenna performance in automotive scenarios - AccurautoFür die präzise Verortung mittels Satellitennavigationssystemen (GNSS), betreiben die deutschen Behörden GNSS-Korrekturdatendienste. Diese werden für die Fahrzeugverortung allerdings noch so gut wie nicht eingesetzt. Dies ist auf große, durch die Empfangsantennen auf Fahrzeugen verursachte Fehler zurückzuführen. Für niedrigpreisige Fahrzeugantennen sind Fehler bis zu einigen Metern gemessen und starke Abhängigkeiten von Fahrzeugtyp und Installationsort gezeigt worden. Das führt zu ungelösten Herausforderungen für die Kalibrierung von GNSS-Empfangsantennen für Fahrzeuge.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: Bundesministerium für Digitalisierung und Verkehr (BMDV), Förderkennnzeichen: 19F1189B
-
Gewinn eines grundlegenden Verständnisses der Mehrwege - Antennen - Empfänger - Interaktionen zur Standardisierung der Kalibrierung von Codephasenvariationen von GNSS-EmpfangsantennenEine der herausforderndsten offenen Forschungsfragen bei der Positionierung mit Globalen Satelliten Navigationssystems (GNSS) ist die genaue Charakterisierung der für die Messungen verwendeten Hardware. Während im Bereich der Trägerphase präzise Kalibrierungsstrategien entwickelt wurden, ist die Charakterisierung der Codephasenvariationen (CPV) aufgrund des höheren Rauschens und des stärkeren Mehrwegeeinflusses immer noch ungelöst, und es fehlt darüber hinaus ein ausreichendes Verständnis der Wechselwirkungen zwischen Antenne, Empfänger und Mehrwegeausbreitung, vor allem in der Geodäsie. Dieses Projekt kombiniert das Hintergrundwissen aus Geodäsie (IfE) und Elektrotechnik (DLR) und wird damit diese Wissenslücke schließen und grundlegende physikalische Einblicke in die Wechselwirkungen zwischen Antenne, Empfänger und Mehrwegeausbreitung liefern, um neuartige Methoden für eine konsistente CPV-Kalibrierung zu etablieren. Wir werden die Erkenntnisse verwenden, um die Verbesserungen durch Anbringen der neuen CPV zu analysieren, die bei Anwendungen in der Luftfahrt, bei der Zeitübertragung und bei PPP entstehen und allgemeine Empfehlungen für die Antenneninstallation ableiten.Leitung: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Jahr: 2022Förderung: DFG, Projektnummer: 470510446
-
GPS Codephasen-Variationen für GNSS-EmpfangsantennenNeben der sehr gut bekannten Existenz von Abweichungen des Empfangszentrums von GNSS-Antennen für Trägerphasen sind gleiche Effekte auch auf der Codephase (Code Phase Variations CPV) gefunden worden. Diese Abweichungen sind stark von der Beschaffenheit und Qualität der Empfangsantennen abhängig und nehmen gerade bei Massenmarktprodukten erhebliche Abweichungen an. Der Nachweis über die Charaktersitik der Codephasen-Variationen ist besonders für Navigationsanwendungen wichtig, da zum einen die Antennen notwendigen Spezifikationen entsprechen müssen und zum anderen die Präzision des Sensors durch Berücksichtigung dieser individuellen Kalibrierwerte deutlich verberssert werden können.Leitung: Dr.-Ing. Tobias KerstenTeam:Jahr: 2018
-
Trägerphasenvariationen (PCC) für neue GNSS-SignaleTrägerphasenvaritionen sind überaus notwendig für die präzise GNSS-Navigation und Positionierung. Derzeit werden nur GPS L1/L2 und GLONASS L1/L2 im Rahmen der operationellen roboterbasierten Kalibierung zur Verfügung gestellt. Die Weiterentwicklung der individuellen Satellitensysteme (GPS, GLONASS) und die Entwicklung von neuen Systemen (Galileo, Beidou) erfordern die Weiterentwicklung des Kalibrierverfahrens zur Bestimmung entsprechender Parameter neuer Systeme und Frequenzen. Ziel des Projektes ist die Bereitstellung und konsistente Verarbeitung von Kalibrierwerten für GPS L5 und Galileo E1/E5 Signalen auf Basis von Kugelfunktionsentwicklungen. Erhobene Phasenpattern werden mit Kalibrierwerten anderer Institutionen vergleichen und koordiniert ausgetauscht.Leitung: Dr.-Ing. Tobias KerstenTeam:Jahr: 2018
-
Verbesserte Positionierung und Navigation durch konsistente Multi-GNSS AntennenkorrekturenUntersuchung von Auswirkungen der Code Phasen Verzögerungen (GDV) auf die GNSS basierte Positionierung und Navigation sowie die Entwicklung eines Verfahrens zum adäquaten Vergleich von Kalibrierergebnissen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2012Förderung: BMWI und Deutsches Zentrum für Luft und Raumfahrt (DLR) - 50NA1216Laufzeit: 2012 - 2014
![]()
![]()
-
Von der Komponentenkalibrierung zur Systemanalyse: konsistente Korrekturverfahren von Instrumentenfehlern für Multi-GNSSMehrwert durch Betrachtung des GesamtsystemsLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2009Förderung: BMWI und Deutsches Zentrum für Luft und Raumfahrt (DLR) - 50NA0903Laufzeit: 2009-2012
![]()
![]()
-
Kalibrierung der GPS Antenne für den Radarsatelliten TanDEM-X (DLR)Kalibrierung von LEO GNSS Antennen für präzise LEO-FormationenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2008
-
Kalibrierung stationsspezifischer Effekte in GPS ReferenzstationsnetzenDeterministisches Korrekturmodell für Mehrwegefehler an GNSS Referenzstationen im Land Niedersachsen.Leitung: Prof. Dr.-Ing. Günter SeeberTeam:Jahr: 2008Förderung: Landesamt für Geoinformation und Landentwicklung Niedersachsen (LGLN)
![]()
![]()




GNSS und Inertialnavigation
-
Accurate prediction of GNSS antenna performance in automotive scenarios - AccurautoFür die präzise Verortung mittels Satellitennavigationssystemen (GNSS), betreiben die deutschen Behörden GNSS-Korrekturdatendienste. Diese werden für die Fahrzeugverortung allerdings noch so gut wie nicht eingesetzt. Dies ist auf große, durch die Empfangsantennen auf Fahrzeugen verursachte Fehler zurückzuführen. Für niedrigpreisige Fahrzeugantennen sind Fehler bis zu einigen Metern gemessen und starke Abhängigkeiten von Fahrzeugtyp und Installationsort gezeigt worden. Das führt zu ungelösten Herausforderungen für die Kalibrierung von GNSS-Empfangsantennen für Fahrzeuge.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: Bundesministerium für Digitalisierung und Verkehr (BMDV), Förderkennnzeichen: 19F1189B
-
Deformation Analysis Based on Terrestrial Laser Scanner Measurements (TLS-Defo, FOR 5455, Project 5)Our research aims to enhance the Terrestrial Laser Scanning (TLS) uncertainty budget by developing strategies for deterministic observation intervals and transforming error bands into point uncertainties. We are also introducing distribution-free surface uncertainty measures to improve the precision and reliability of TLS data.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: Deutsche Forschungsgemeinschaft (DFG) - Forschergruppe (FOR) 5455
-
Modellierung von Quantensensoren in einem realistischen Navigationskontext – SimulaQrUmPositionierung, Navigation und Timing sind entscheidend für moderne Systeme im Transportwesen, der Landwirtschaft und der Raumfahrt, jedoch stoßen herkömmliche GNSS-Signale oft an ihre Grenzen, etwa in Städten oder unter Wasser. Dieses Projekt entwickelt gemeinsam mit Partnern wie dem Institut für Quantenoptik (IQO) und Airbus Defence and Space ein neues Simulationswerkzeug, um Navigationslösungen durch die Kombination von Quantensensoren und Trägheitssensoren zuverlässiger und stabiler zu machen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2024Förderung: European Space Agency (ESA), Förderkennzeichen: NAVISP-EL1-089
![]()
![]() © IQO
© IQO
-
Entwicklung eines DAB-Empfangsmoduls zur GNSS-KorrekturdatenübermittlungIn diesem Projekt wird ein DAB-zu-GNSS-Empfangsmodul entwickelt, welches GNSS-Korrekturen über DAB-Technologie empfangen und verarbeiten kann. Es wird im Vergleich zur Mobilfunkübertragung getestet. Die Evaluierung umfasst die quantitative und qualitative Untersuchung des Datenstroms und praktische Tests des Moduls in GNSS-Anwendungsszenarien. Das Projekt erfolgt in Kooperation mit der RFmondial GmbH.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2023Förderung: Zuwendung aus Mitteln des Europäischen Fonds für Regionale Entwicklung (EFRE) und des Landes Niedersachsen im Förderprogramm "Innovationsförderprogramm für Forschung und Entwicklung"
-
Navigation mit Quantensensorik im Weltraum (SpaceQNav)Das Projekt widmet sich der Erforschung innovativer Quanten-Inertialsensorik zur Verbesserung der Weltraumnavigation. Ziel ist es, die Navigationsleistung erheblich zu steigern, indem die Präzision und Langzeitstabilität für Missionen von der Erdumlaufbahn bis zur Mondoberfläche revolutioniert wird. Durch die Analyse von Designanforderungen und Auswertestrategien soll das volle Potenzial dieser Technologie ausgeschöpft werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2023Förderung: Bundesministerium für Wirtschaft und Klimaschutz (BMWK/DLR), Förderkennzeichen: 50NA2310A
-
Entwicklung einer kompakten Experimentalplattform eines gyro-stabilisierten Quantennavigationssensors (QGyroPlus)Ziel des Projekts ist die Entwicklung eines einzigartigen Sechs-Achsen-Quanteninertialnavigationssensors, der erstmalig driftfreie und hochpräzise Navigation ermöglicht. Diese bahnbrechende Technologie wird als kompakte Experimentalplattform im Projektverlauf getestet und könnte die Tür zu völlig neuen Anwendungsbereichen in der autonomen Navigation öffnen.Leitung: Prof. Dr. Steffen SchönTeam:Jahr: 2023Förderung: Bundesministerium für Wirtschaft und Klimaschutz (BMWK / DLR), Förderkennzeichen: 50NA2106
![]()
![]()
-
5GAPS: 5G Access to Public SpacesIn diesem Forschungsvorhaben werden die Positionierungsmöglichkeiten des neusten Mobilfunkstandards 5G NR untersucht. Durch den steigenden Kommunikationsbedarf und die flächendeckende Installation von 5G NR Netzen, können terrestrische Signalquellen eine Alternative oder Ergänzung zu GNSS Signalen bieten, wenn GNSS Signale nicht verfügbar oder durch die Umgebung eingeschränkt sind.Leitung: Prof. Dr.-Ing Steffen SchönTeam:Jahr: 2022Förderung: Bundesministerium für Digitales und Verkehr (BMDV), Förderkennzeichen: 45FG121_F
-
Interferometrische Glasfaserverbindungen (SFB 1464, A05)Um das chronometrische Nivellement als Routinewerkzeug für die Geodäsie zu etablieren, sind Forschung und Entwicklungen für hochpräzise Frequenzübertragung in den Bereichen Interferometrische Glasfaserverbindungen (Interferometric Fibre Links, IFLs) und Globales Navigationssatellitensystem - Frequenztransfer (GNSS-FT) erforderlich. Die Entwicklung von feldtauglichen IFLs-Geräten, ultrapräziser GNSS-FT und deren Einsatz für chronometrische Nivellements sind neue Forschungs- und Entwicklungsgebiete, die viele Anwendungen von geodätischem Interesse eröffnen werden. Unser Ziel ist es, eine chronometrische Nivellement-Kampagne zwischen Insel und Festland unter Verwendung von IFL und GNSS-FT sowie der in Teilprojekt A04 entwickelten transportablen optischen Uhr zu realisieren.Leitung: Prof. Dr.-Ing. Steffen Schön, Dr. Jochen KronjägerTeam:Jahr: 2021
-
Korrektur von GNSS-Mehrwegeeffekten für die zuverlässige Eigenlokalisierung von hochautomatisierten Fahrzeugen in innerstädtischen Bereichen (KOMET)Die im Fahrzeugbereich verwendete Code-Range (Codemessung) liefert aufgrund ihres hohen Messrauschens nicht die notwendige Auflösung der Ortung. Aufgrund der komplexen GNSS-Signalausbreitung (Signalabschattung, Mehrwegeeffekte) in urbanen Umgebungen ist die Bestimmung einer genauen und robusten Positionslösung eine besondere Herausforderung - z.B. bei der Ortung in engen Straßenschluchten. Das geplante Forschungsvorhaben fokussiert sich daher auf die Entwicklung und Anwendung innovativer Korrekturverfahren zur Reduktion auftretender Mehrwegeeffekte, um die trägerphasenbasierte GNSS-Ortung zu verbessern.Leitung: Prof. Dr.-Ing. Steffen Schön, Dr.-Ing. Tobias KerstenTeam:Jahr: 2020Förderung: BMWi / TÜV Rheinland Consulting GmbH
![]()
![]() © Ch. Skupin (Bosch)
© Ch. Skupin (Bosch)
-
Bounding and propagating observation uncertainty with interval mathematic (GRK 2159)Intervals (Jaulin et al 2001) can be seen as a natural way to bound observation uncertainty in navigation systems such as GPS, IMU or optical sensors like LIDAR, since they are in principle free of any assumption about probability distributions and can thus describe adequately remaining systematic effects (Schön 2016, Schön and Kutterer 2006). In this project, we intent to experimentally investigate in more details the actual size of observation intervals.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2020Förderung: Deutsche Forschungsgemeinschaft (DFG) - Graduiertenkolleg GRK 2159
-
FIRST: Fingerprinting, Integrity Monitoring and Receiver Signal Processing Using Miniature Atomic Clock TechnologyUm die Performance der Bestimmung von Position, Geschwindigkeit und Zeit mittels GNSS-Messungen zu verbessern, werden heute häufig Chip Scale Atomic Clocks (CSACs) genutzt, welche dem GNSS-Empfänger ein hochstabiles Frequenzsignal zur Verfügung stellen. Die Verbesserung der Navigationslösung erfolgt bisher allerdings ausschließlich algorithmisch. In diesem Vorhaben soll nun der Einfluss von der Empfängeruhr auf die Qualität der Signalverarbeitung in einem Software-Empfänger untersucht werden, indem die internen Verarbeitungsschritte an die hohe Frequenzstabilität des CSAC-Signals angepasst werden. Zusätzlich soll die Machbarkeit des Fingerprintings mit hochstabilen Atomuhren unter verschiedenen dynamischen Bedingungen untersucht und zusätzlich Integritätsmaße für den GNSS-basierten Zeittransfer entwickelt werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2020Förderung: Bundesministerium für Wirtschaft und Energie (BMWi), Förderkennzeichen: 50NA2101
![]()
![]()
-
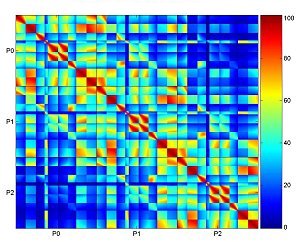
Collaborative Navigation for Smart Cities (GRK 2159)Global Navigation Satellite Systems (GNSS) is the only navigation sensor that provides absolute positioning. However, urban areas form the most challenging environment for GNSS to achieve a reliable position. Because of the reduced satellite visibility and disturbed signal propagation like diffraction and multipath, the resulting position has a reduced accuracy and availability. The overall research objective of this project is to reduce these shortcomings through collaboration. Therefore, similarity of multipath at different locations within streets will be studied.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2019Förderung: Deutsche Forschungsgemeinschaft (DFG) - Graduiertenkolleg GRK 2159
-
QGyro: Quantum Optics Inertial Sensor ResearchIn diesem Vorhaben sollen hochgenaue Quanteninertialsensoren zur Stützung konventioneller Inertialnavigationssensoren entwickelt und getestet werden, die dann in verschiedenen weiteren Entwicklungsstufen bis zu 6 Messfreiheitsgraden ausgebaut und für eine autonome Navigation eingesetzt werden können.Leitung: Prof. Dr.-Ing. SchönTeam:Jahr: 2019Förderung: Bundesministerium für Wirtschaft und Klimaschutz (BMWK / DLR), Förderkennzeichen: 50RK1957Laufzeit: 2019 - 2022
![]()
![]()
-
Entwicklung und Test einer für Quantensensoren adäquaten Berechnungsstrategie für die InertialnavigationDurch neue Messprinzipien haben Quantensensoren signifikante Verbesserungen in Stabilität und Genauigkeit bei der Erfassung von inertialen Einflüssen erzielt. Anstelle mechanischer Federsysteme in Beschleunigungsmessern oder durch einen Faserkreisel oder Ringresonator umschlossene Flächen in Lasergyroskopen sind in Quantensensoren die Skalenfaktoren an atomare Übergänge gebunden und auf Frequenzmessungen zurückzuführen. Die alternativen Messverfahren und hohen Sensitivitäten der Quantensensoren erfordern eine adäquate Auswertestrategie, die sich von der klassischen Herangehensweise der Inertialnavigation unterscheidet. Ziel der Studie ist die Entwicklung und der Test einer entsprechenden Berechnungsstrategie, die gezielt die Anwendbarkeit der einzelnen Berechnungsschritte bei der Quanteninertialnavigation überprüft, und geeignete Alternativen, beispielsweise bei der Integrationsdynamik oder geschätzten Systemparametern, vorschlägt.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2018Förderung: DLR
![]()
![]()
-
Integrity Monitoring for Network RTK SystemsFrom the advent of the satellite positioning techniques, civil users have always been trying to find a way to have more accurate and precise coordinates of their position. Differential concepts, from early days of GPS, have been considered. Applying the RTCM format, made the transmission of corrections possible from reference stations to the users. At first stage the corrections were casted to the users from one single station, which is called single RTK (Real Time Kinematic). This method is limited in some ways; degrading by increasing distance from CORS (Continuously Operating Reference Station), needed same signals at reference and rover and remaining the reference station errors. For compensating these shortages, the Network RTK concept appeared. In NRTK the corrections are produced using a network (at least three) of reference stations. The concept of Precise Point Positioning (PPP) is currently associated with global networks. Precise orbit and clock solutions are used to enable absolute positioning of a single receiver. However, it is restricted in ambiguity resolution, in convergence time and in accuracy. Precise point positioning based on RTK networks (PPP-RTK) overcomes these limitations and gives centimeter-accuracy in a few seconds.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2018Förderung: Deutscher Akademischer Austauschdienst (DAAD)
-
VeNaDU 2: Verbesserte Positionierung und Navigation durch UhrmodellierungDieses Folgeprojekt zum Vorhaben VeNaDU untersucht zum einen den Performance-Gewinn durch den Einsatz hochstabiler Atomuhren in kinematischem PPP. Zum anderen soll eine Hardware-technische Umsetzung einer miniaturisierten Atomuhr in einem Einfrequenz-Empfänger realisiert werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2017
![]()
![]()
-
Optimale kollaborative Positionierung (GRK 2159, Thema 4)Kollaboratives Positionierung (CP) ist eine vielversprechende Technik, die auf einer Gruppe von dynamischen Knoten (Fußgänger, Fahrzeuge usw.) basiert. Diese sind mit verschiedenen (zeitsynchronisierten) Sensoren ausgestattet. Die Qualität der Positionierungs-, Navigations- und Zeitbestimmungsinformationen (PNT) kann dabei durch die Durchführung von Messungen zwischen Knotenpunkten oder Elementen der Umgebung (Stadtmöbel, Gebäude usw.) erhöht werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2016Förderung: DFG
![]()
![]()
-
Alternative Integritätsmaße mittels Intervallmathematik (GRK 2159, Thema 1)Dieses Dissertationsvorhaben beschäftigt sich mit der Entwicklung von alternativen Integritätsmaßen auf Basis der Intervallmathematik, Fuzzy-Theorie und unscharfer Zufallsvariablen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2016Förderung: DFG
![]()
![]()
-
SIMULTAN: Integriertes Geodätisches Überwachungskonzept für Erdfall-induzierte Oberflächendeformation und Massenumlagerung - AP 3.1 (GNSS)Prozessorientierte Interpretation unter Nutzung geophysikalischer und geologischer Informationen und Entwicklung eines langfristigen Überwachungskonzeptes durch Anwendung eines iterativen, rückkoppelnden Optimierungsansatz.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2015Förderung: BMBF - Bundesministerium für Bildung und ForschungLaufzeit: 2015-2019
![]()
![]()
-
Improved GPS data analysis for the Swarm constellationNew concepts for GPS observation data quality assessment and positioning should be developed and evaluated taking advantage of variable geometries in the Swarm constellation.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2015Förderung: DFG
-
High-Rate GNSS-Empfänger in der Flug-Navigation und -GravimetrieEntwicklung einer Methodik zur Datenvorverarbeitung und zur Geschwindigkeits- und Beschleunigungsschätzung aus Trägerphasenmessungen mit hoher Abtastrate (100Hz)Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: Bürgernahes Flugzeug Nachwuchsfond
![]()
![]()
-
Precise Point Positioning mit GPS-Einfrequenz-Empfängern und der Radom-Antenne in Raisting für das Autonome Fahren (PPP-AF)Teilprojekt: Bestimmung von Empfänger-BiasesLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: BMWi und DLRLaufzeit: 2014-2015
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Ziel des Projektes ist die Verbesserung der Genauigkeit kinematischer Orbits von erdnahen Satelliten durch weiterentwickeltes Precise Point Positioning (PPP), welches um den Ansatz der Empfängeruhrmodellierung und das Konzept des Virtuellen Empfängers erweitert wird.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: DFG
![]()
![]()
-
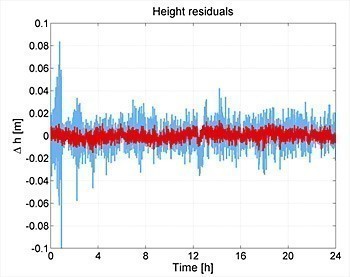
VeNaDU: Verbesserte Positionierung und Navigation durch UhrmodellierungIn diesem Forschungsvorhaben sollen empfängerseitig die Vorteile moderner hochstabiler Atomuhren für die GNSS-basierte Positionierung und Navigation untersucht und innovative Konzepte zur Uhrmodellierung entwickelt werden.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2013Förderung: BMWi / DLRLaufzeit: 10/2013 - 11/2016
![]()
![]()
-
Turbulenz Untersuchungen und verbesserte Modellierung der atmosphärischen Refraktion mit VLBI und GNSSVerbesserte Beschreibung von Refraktionsindexschwankungen, Bestimmung von Turbulenz-Parametern und verbesserte Modellierung der neutrosphärischen RefraktionLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2012Förderung: DFG (SCHO 1314/3-1)
-
Modellierung physikalischer Korrelationen von GNSS-Phasenbeobachtungen mit Ansätzen der TurbulenztheorieModellierung physikalischer Korrelation von GNSS Phasebeobachtungen mit Ansätzen der TurbulenztheorieLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: Das Projekt wird gefördert durch die Deutsche Forschungsgemeinschaft (SCHO 1314/1-1).
![]()
![]()
-
Navigation und Positionierung in schwieriger UmgebungAnalyse von High-Sensitivity GNSS SensorenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011
![]()
![]()
-
Modeling and correction of GNSS multipath effect through Software receiver and Ray tracingBeschreibung von Multipath durch Software-Empfänger und Raytracing.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: BMWI und Deutsches Zentrum für Luft und Raumfahrt (DLR)
-
Bürgernahes FlugzeugVerbesserung der Qualität und Verminderung von Signalverlusten bei GNSS-gestützen gekurvten Landeanflügen im Rahmen der Entwicklung eines "Bürgernahen Flugzeugs"Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: Land Niedersachsen
![]()
![]()
-
Qualitätssicherung für permanente GNSS-StationenQualitätsmanagement an permanenten GNSS Referenzstationen in Niedersachsen.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2010Förderung: Landesamt für Geoinformationen und Landentwicklung Niedersachsen (LGLN)
-
Konzepte zur Qualitätsbeschreibung in aktiven GNSS-ReferenzstationsnetzenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2009Förderung: Landesamt für Geoinformationen und Landentwicklung Niedersachsen (LGLN)
-
Kalibrierung der GPS Antenne für den Radarsatelliten TanDEM-X (DLR)Kalibrierung von LEO GNSS Antennen für präzise LEO-FormationenLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2008
-
Abschätzung der Größe systematischer Resteffekte mit Methoden der IntervallmathematikErfassung und adäquate mathematische Beschreibung des Gesamtunsicherheitshaushaltes von GNSS Beobachtungen mit Verfahren der IntervallmathematikLeitung: Prof. Dr.-Ing. Steffen SchönJahr: 2006Förderung: Deutsche Forschungsgemeinschaft (DFG)
-
Modellierung distanzabhängiger systematischer EffekteEntwicklung eines Korrekturmodell für distanzabhängige Effekte in kleinen GPS Netzen sowie Abschätzung der Größe systematischer Resteffekte mit Methoden der IntervallmathematikLeitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2006

























QUEST
-
Analyse des Einflusses hochgenauer externer Uhren auf die GNSS-AuswertungAnwendung hochgenauer Oszillatoren in der Satellitennavigation.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2011Förderung: QUEST
![]()
![]()
SFB 1128 (geo-Q)
-
Kinematic GNSS positioning of Low Earth Orbiters (CRC 1128, B03)Ziel des Projektes ist die Verbesserung der Genauigkeit kinematischer Orbits von erdnahen Satelliten durch weiterentwickeltes Precise Point Positioning (PPP), welches um den Ansatz der Empfängeruhrmodellierung und das Konzept des Virtuellen Empfängers erweitert wird.Leitung: Prof. Dr.-Ing. Steffen SchönTeam:Jahr: 2014Förderung: DFG
![]()
![]()





